Center Of Mass
The centre of mass is a crucial concept in physics, representing the point where an object's mass is concentrated for analyzing translational motion. It is essential for understanding the behaviour of objects under various forces, with applications in fields like mechanics, robotics, and aerospace engineering. This article will explore the principles, and methods for determining the centre of mass, and its significance in both theoretical and practical contexts. This is a very important concept of class 11 physics for exams like JEE, NEET or state board. In the last ten years of the JEE Main exam, seven questions have been asked and for NEET four questions have been asked on this concept.
Definition of Centre of Mass
The Centre of mass of a body is defined as a single point at which the whole mass of the body or system is imagined to be concentrated and all external forces are applied there. It is the point where if a force is applied it moves in the direction of the force without rotating.
x, y, & z coordinates of the centre of mass
For a system of N discrete particles
$\begin{aligned}
x_{c m} & =\frac{m_1 x_1+m_2 x_2 \ldots \ldots \ldots}{m_1+m_2 \ldots \ldots} \\
y_{c m} & =\frac{m_1 y_1+m_2 y_2+m_3 y_3 \ldots \ldots \cdots}{m_1+m_2+m_{3 \ldots \ldots}} \\
z_{c m} & =\frac{m_1 z_1+m_2 z_2+m_3 z_3 \ldots \ldots \cdots}{m_1+m_2+m_3 \ldots \ldots}
\end{aligned}$
Where $m_1, m_2$........ $\qquad$ are mass of each particle and $x_1, x_2$........... $\qquad$ $y_1, y_2$....... $\qquad$ $z_{1,} z_2$....... are respectively $\mathrm{x}, \mathrm{y}, \& \mathrm{z}$ coordinates of particles. It is the unique point where the weighted relative position of the distributed mass sums to zero.
Centre of Mass of a Continuous Distribution
$x_{c m}=\frac{\int x d m}{\int d m}, y_{c m}=\frac{\int y d m}{\int d m}, z_{c m}=\frac{\int z d m}{\int d m}$
Where dm is the mass of the small element. x, y, z are the coordinates of the dm part.
Important points about the position of the centre of mass
Its position is independent of the coordinate system chosen.
Its position depends upon the shape of the body and the distribution of mass. and depending on this it may lie inside of the body as well as outside the body.
For symmetrical bodies having a homogenous distribution of mass, the centre of mass coincides with the geometrical centre of the body.
It changes its position only under the translatory motion whereas there is no effect on its position because of the rotatory motion of the body.
Centre of Gravity
The Centre of gravity of a body is a point, through which the resultant of all the forces experienced by various particles of the body due to the attraction of the earth, passes irrespective of the orientation of the body.
If the body is located in a uniform gravitational field, then the centre of mass coincides with the centre of gravity of body, and if not then its centre of mass and centre of gravity will be at two different locations.
Recommended Topic Video
Solved Examples Based on Centre of Mass
Example 1: Consider a two-particle system with particles having masses m1 and m2 . If the first particle is pushed towards the centre of mass through a distance d, by what distance should the second particle be moved, so as to keep the centre of mass at the same position?
1) $d$
2) $\frac{m_2}{m_1} d$
3) $\frac{m_1}{m_1+m_2} d$
4) $\frac{m_1}{m_2} d$
Solution:
Centre of Mass of a system of N discrete particles
$\begin{aligned}
x_{c m} & =\frac{m_1 x_1+m_2 x_2 \ldots \ldots \ldots}{m_1+m_2 \ldots \ldots} \\
y_{c m} & =\frac{m_{1 y_1}+m_2 y_2+m_3 y_3 \ldots \ldots \cdots}{m_1+m_2+m_{3 \ldots} \ldots} \\
z_{c m} & =\frac{m_1 z_1+m_2 z_2+m_3 z_3 \ldots \ldots \cdots}{m_1+m_2+m_{3 \ldots \cdots}}
\end{aligned}$
wherein
m1, m2 ........... are mass of each particle and x1, x2 ..........y1, y2 ............ z1, z2 are respectively x, y, & z coordinates of particles.
$ \Delta x_{c m}=\frac{m_1 \cdot \Delta x_1+m_2 \cdot \Delta x_2}{m_1+m_2}$
So, Let be moved by $x_2$ so as to keep the centre of mass at the same position
$\begin{aligned}
& \Delta x_1=-d \text { and } \Delta x_{C M}=0 \\
& \therefore \quad m_1(-d)+m_2\left(x_2\right)=0 \\
& \text { or } \quad m_1 d=m_2 x_2 ; \quad \text { or } \quad x_2=\frac{m_1}{m_2} d
\end{aligned}$
Hence, the answer is option (4).
Example 2: A T-shaped object with the dimensions shown in the figure, is lying on a smooth floor. A force $\vec{F}$ is applied at the point $\mathrm{P}$ parallel to $\mathrm{AB}$ such that the object has only the translational motion without rotation. Find the location of $\mathrm{P}$ with respect to $\mathrm{C}$

1) $\frac{4}{3} l$
2) $l$
3) $\frac{3}{4} l$
4) $\frac{3}{2} l$
Solution
Centre of Mass of a system of N discrete particles -
$\begin{aligned}
x_{c m} & =\frac{m_1 x_1+m_2 x_2 \ldots \ldots \cdots}{m_1+m_2 \ldots \ldots} \\
y_{c m} & =\frac{m_1 y_1+m_2 y_2+m_3 y_3 \ldots \ldots \cdots}{m_1+m_2+m_3 \ldots \ldots} \\
z_{c m} & =\frac{m_1 z_1+m_2 z_2+m_3 z_3 \ldots \ldots \cdots}{m_1+m_2+m_{3 \ldots \cdots}}
\end{aligned}$
wherein
$\mathrm{m}_1, \mathrm{~m}_2.......$ $\qquad$ are mass of each particle $\mathrm{x}_1, \mathrm{x}_2$ ............$\qquad$ $y_1, y_2$........ $\qquad$ $\mathrm{z}_1, \mathrm{z}_2$ are respectively $\mathrm{x}$, $\mathrm{y}, \& \mathrm{z}$ coordinates of particles.
It is a case of translation motion without rotation. The force should act at the centre of mass
$$
Y_{c m}=\frac{(m \times 2 l)+(2 m \times l)}{m+2 m}=\frac{4 l}{3}
$$
Example 3: Three particles of masses 50 g, 100 g and 150 g are placed at the vertices of an equilateral triangle of side 1 m (as shown in the figure ). The (x,y) coordinates of the centre of mass will be:

1) $\left[\frac{\sqrt{3}}{4} m, \frac{5}{12} m\right]$
2) $\left[\frac{7}{12} m, \frac{\sqrt{3}}{8} m\right]$
3) $\left[\frac{7}{12} m, \frac{\sqrt{3}}{4} m\right]$
4) $\left[\frac{\sqrt{3}}{8} m, \frac{7}{12} m\right]$
Solution
Centre of Mass of a system of N discrete particles
$\begin{aligned}
& x_{c m}=\frac{m_1 x_1+m_2 x_2 \ldots \ldots \ldots}{m_1+m_2 \ldots \ldots} y_{c m}=\frac{m_1 y_1+m_2 y_2+m_3 y_3 \ldots \ldots \ldots}{m_1+m_2+m_3 \ldots \ldots} \\
& z_{c m}=\frac{m_1 z_1+m_2 z_2+m_3 z_3 \ldots \ldots \ldots}{m_1+m_2+m_3 \ldots \ldots}
\end{aligned}$
wherein
m1, m2 ........... are mass of each particle and x1, x2 ..........y1, y2 ............ z1, z2 are respectively x, y, & z coordinates of particles.

$\begin{aligned}
& X_{c m}=\frac{50 \times 0+100 \times 1+150 \times \frac{1}{2}}{50+100+150}=\frac{175}{300}=\frac{7}{12} \mathrm{~m} \\
& Y_{c m}=\frac{50 \times 0+100 \times 0+150 \times \frac{\sqrt{3}}{2}}{50+100+150}=\frac{\sqrt{3}}{4} \mathrm{~m}
\end{aligned}$
Example 4: $\mathrm{A}$ uniform thin rod $\mathrm{AB}$ of length $\mathrm{L}$ has linear mass density $\mu(x)=a+\frac{b x}{L}$ where $\mathrm{x}$ is measured from $\mathrm{A}$. If the $\mathrm{CM}$ of the rod lies at a distance of $\left(\frac{7}{12} L\right)$ from $\mathrm{A}$, then $\mathrm{a}$ and $b$ are related as: and b are related as :
1) $a=b$
2) $a=2 b$
3) $2 a=b$
4) $3 a=2 b$
Solution:
Centre of Mass of a Continuous Distribution
$x_{c m}=\frac{\int x d m}{\int d m}, y_{c m}=\frac{\int y d m}{\int d m}, z_{c m}=\frac{\int z d m}{\int d m}$
wherein
dm is the mass of the small elements. x, y, and z are the coordinates of the dm part.
As we know that
CM of the rod of length $l: x_{c m}=\frac{\int_0^L \mu(x) x d x}{\int_0^L \mu(x) d x}=\frac{\int_0^L\left(a+\frac{b x}{L}\right) x d x}{\int_0^L\left(a+\frac{b x}{L}\right) d x}=\frac{a \frac{L^2}{2}+\frac{b L^2}{3}}{a L+\frac{b L}{2}}$
$
\begin{aligned}
& \Rightarrow \frac{7}{12} L=\frac{\frac{a L^2}{2}+\frac{b L^2}{3}}{a L+\frac{b L}{2}} \\
& \Rightarrow \frac{7}{4}=\frac{3 a+2 b}{2 a+b} \\
& \Rightarrow 14 a+7 b=12 a+8 b \\
& \Rightarrow 2 a=b
\end{aligned}
$
Hence, the answer is the option (3).
Example 5: Three-point particles of masses 1.0 kg, 1.5 kg and 2.5 kg are placed at three corners of a right triangle of sides 4.0 cm, 3.0 cm, and 5.0 cm as shown in the figure. The centre of mass of the system is at a point:
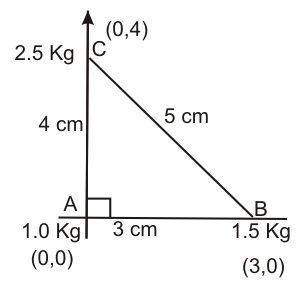
1) $2.0 \mathrm{~cm}$ right and $0.9 \mathrm{~cm}$ above $1 \mathrm{~kg}$ mass
2) $0.9 \mathrm{~cm}$ right and $2.0 \mathrm{~cm}$ above $1 \mathrm{~kg}$ mass
3) $0.6 \mathrm{~cm}$ right and $2.0 \mathrm{~cm}$ above $1 \mathrm{~kg}$ mass
4) $1.5 \mathrm{~cm}$ right and $1.2 \mathrm{~cm}$ above $\mathrm{~kg}$ mass
Solution:
$\begin{aligned}
& \text { let } \mathrm{m} 1=1 \mathrm{~kg}, \mathrm{~m} 2=1.5 \mathrm{~kg} \text { and } \mathrm{m} 3=2.5 \mathrm{~kg} \\
& \mathrm{x} 1=0, \mathrm{x} 2=3, \mathrm{x} 3=0 \text { and } \mathrm{y} 1=0, \mathrm{y} 2=0, \mathrm{y} 3=4 \\
& x_{\text {com }}=\frac{m_1 x_1+m_2 x_2+m_3 x_3}{m_1+m_2+m_3} \text { and } y \text { com }=\frac{m_1 y_1+m_2 y_2+m_3 y_3}{m_1+m_2+m_3}
\end{aligned}$
Let point A be the origin and mass m1=1.0 kg be at the origin.
So, $x_{com}=\frac{1\times0+1.5\times3+2.5\times0}{1+1.5+2.5}=\frac{4.5}{5}=0.9$
and $y_{com}=\frac{1\times0+1.5\times0+2.5\times4}{1+1.5+2.5}=\frac{10}{5}=2$
so the centre of mass of the system is at (0.9,2).
So from the figure, we can say that the 0.9 cm right and 2 cm above the 1 kg mass.
So option (2) is correct.
Summary
The singular point at which the weighted relative position of the distributed mass adds up to zero is the centre of mass of a mass distribution in space. This is the point at which an angular acceleration cannot be produced when a force is applied to produce a linear acceleration. The centre of mass of a body depends on the distribution of mass inside. In fact there is nothing at the location of the centre of mass. It is just a useful mathematical concept to simplify the study of the motion of a rigid body.
